In this article, we continue our series on comparing various wireless connectivity options for different types of IoT applications.
In the previous article, we covered the application of Condition Monitoring, compared the different wireless technologies, and assessed which ones would be the best fit for the application. In this post, we’ll go over another popular IoT application: Indoor Navigation.
What is Indoor Navigation?
Indoor navigation solutions – also referred to as wayfinding solutions – are commonly used in indoor environments where GPS does not operate well. But before we dive into indoor navigation solutions in more detail, let’s take a step back and define some high-level concepts.
The overarching term used to describe solutions concerned with location, in general, is Location Services. Location Services can be categorized into two main categories:
Proximity Solutions: The simpler of the two and leverage one or more technologies to determine the location of two devices relative to each other.
Positioning Systems: Used to determine the physical location of devices and involve more sophisticated infrastructure deployments.
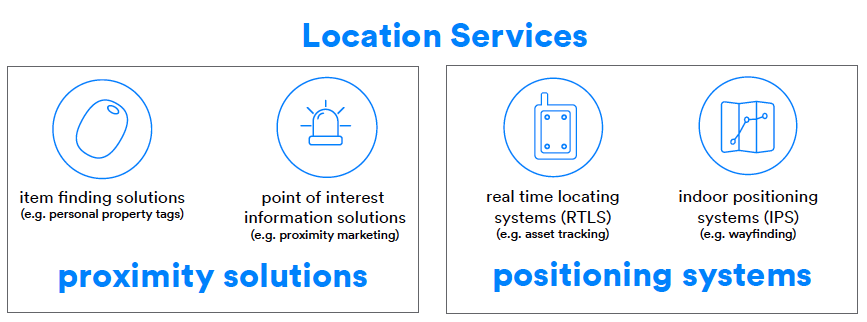
Proximity solutions could be further categorized into two types (shown in the left-hand side of the diagram above):
Item Finding Solutions: An example of an item finding solution is item finding tags that are attached to keychains, luggage, remote controls, and other personal items for the purpose of tracking and locating these devices when they are misplaced or lost.
Point of Interest Information Systems: The application of displaying relevant information to the user on their smartphone when they are near a specific device in a fixed location. For example, while a user is navigating a shopping center, they could be notified when approaching an item that’s on sale from within the shopping center’s mobile app.
Positioning systems could be further categorized into two types (shown in the right-hand side of the diagram above):
Real-Time Locating Systems (RTLS): Used for both asset tracking as well as people tracking within a facility. RTLS solutions are network-centric systems where the locations are tracked and reported to a backend server which provides this information to users. Usually, the devices themselves are not aware of their locations.
For example, these solutions can locate and track the position of pallets, forklifts, and workers in a warehouse, or ultrasound machines and patients in a hospital, helping to ensure safety and optimize response time in an emergency.
Indoor Positioning Systems (IPS): IPS solutions work in the opposite way of RTLS solutions – they are device centric where the devices are aware of their locations and report the positioning to the users of the devices (usually via a smartphone app). Some examples of indoor positioning systems include indoor navigation in airports, museums, shopping malls, theme parks, healthcare facilities, conference centers, and more.
Examples of IPS solutions include indoor navigation systems (wayfinding) and automated guided vehicles (AGV). Our focus in this article is indoor navigation (wayfinding) systems. Now that we’ve covered the high-level aspects of location services, let’s look at the general concept of how indoor navigation works.
The basic principle behind wayfinding is to utilize wireless technologies to determine a user’s location within an area and then present it to them on a map within a smartphone app, allowing them to navigate the surrounding area.
Depending on the technology/technologies being used, different methods and calculations are utilized to determine the user’s location. Most methods utilize either RSSI measurements or Time-of-Flight measurements for determining the user’s location via multilateration or triangulation calculations.
The basic concept behind multilateration is to determine the location of an object using multiple calculated distances between the object and multiple stations placed at fixed locations.
Trilateration is another term that’s commonly used in this field and refers to the use of multilateration with three known fixed points to which distance is measured and used to calculate the position of a moving object.
Triangulation, on the other hand, utilizes the measurement of angles to determine the location and distance from the fixed stations.
More advanced techniques include radio direction finding, which refers to the practice of determining the direction from which a received signal was transmitted. Radio direction finding has been in practice since the early twentieth century and is used in systems to support everything from aviation and nautical navigation to wildlife tracking. Direction finding provides much more accurate positioning calculations than multilateration and triangulation techniques, but usually at a higher cost.
In some applications, the calculated user locations could also be reported to a backend server for purposes of data analysis and improving the usability of the space.
![]()
FEATURED INFOGRAPHIC
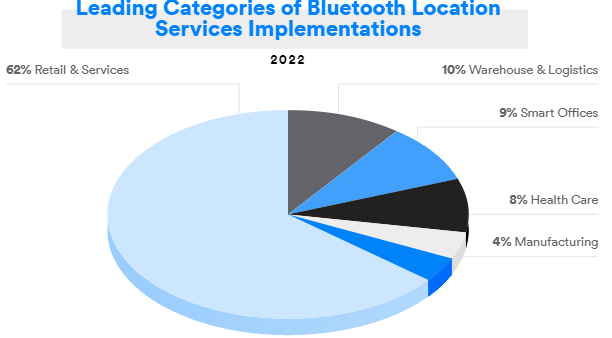
Bluetooth Location Services
See 8 use cases for enhancing building efficiencies and creating a better visitor experience, discover new data that supports the latest trends and forecasts, and find out what’s driving the rapid adoption of location services solutions.
What Are the Benefits of Indoor Navigation?
In general, indoor navigation is used to provide the following benefits:
- Better user experience for users navigating indoor spaces where GPS is not practical
- Improving worker efficiency in commercial buildings
- Improving traffic flow in congested areas
- Allowing users to find each other in a facility
- Enabling smart building operations and enhancements
- Using collected location data to optimize the workflow and improve the usability of the space
The benefits provided by an implementation depend on the goals of the specific application in question. Examples of applications that utilize indoor navigation include:
- Airports
- Museums
- Shopping malls and supermarkets
- Theme parks
- Healthcare facilities
- Conference centers
- Dining and restaurants
The Most Critical Attributes for Wireless Technologies Utilized in Indoor Navigation
There are a few key attributes that need to be considered in wireless technologies utilized for indoor navigation. These are:
- Scalability
- Privacy and security
- Positioning resolution (accuracy and latency)
- Ubiquity and adoption
Comparison of the Wireless Technologies Most Suitable for Indoor Navigation
The most suitable wireless technologies for indoor navigation applications are:
- Bluetooth® Low Energy
- Ultra-wideband (UWB)
- Wi-Fi
- Ultrasonic
Let’s talk a bit about how each of them fits within the application of indoor navigation.
Bluetooth Low Energy
Bluetooth® Low Energy is the most common wireless technology used in indoor navigation systems, and for a few good reasons. Some of the most important benefits of using Bluetooth Low Energy for indoor navigation include:
- Secure and private implementation
- Wide adoption and uniquity across smartphones globally
- Support for large scale deployments
After Apple released its standard format for iBeacon in 2013, Bluetooth beacons took off and became widely adopted in many use cases, especially in retail marketing and indoor navigation applications.
Traditionally, Bluetooth Low Energy beacons have been used as a popular solution for indoor navigation systems. The basic principle behind these systems is to install Bluetooth beacons in fixed locations within a facility where they transmit advertising packets that are picked up by the user’s smartphone. The smartphone is then able to calculate its own location based on the RSSI of the packets received from the beacons and possibly place the calculated location on a map presented to the user.
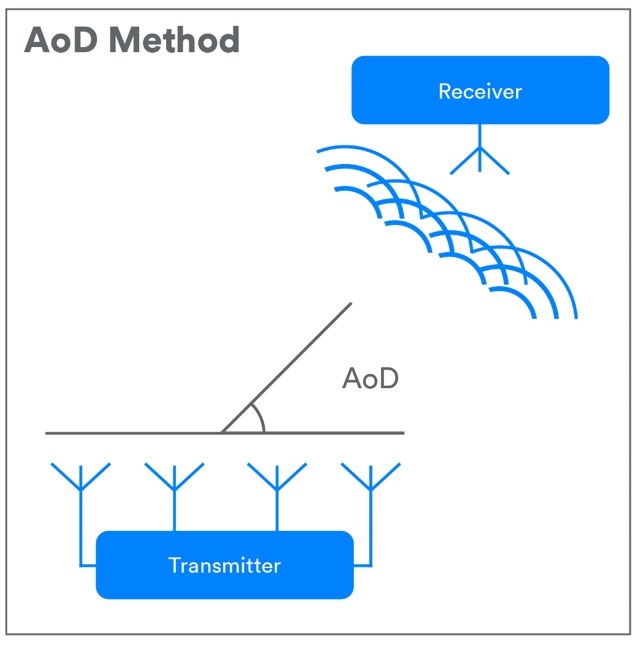
In 2019, a new exciting feature called Bluetooth® Direction Finding was introduced in version 5.1 of the Bluetooth standard specification. This new feature allows Bluetooth Low Energy devices to increase the accuracy of the location of Bluetooth devices based on either the angle of departure (AoD), the angle of arrival (AoA), or both. As we mentioned earlier, the increased accuracy usually comes at a higher cost.
For the case of indoor navigation, AoD is the more suitable method usually implemented. In this method, the device to which direction is being determined, such as a locator beacon in an IPS solution, transmits a special signal using multiple antenna arranged in an array. The receiving device, such as a mobile phone in that same IPS solution, has a single antenna. As the multiple signals from the transmitting device cross the antenna in the receiving device, the receiving device takes IQ samples. Based on the IQ sample data, the receiving device can calculate the relative signal direction.
Ultra-Wideband (UWB)
Ultra-Wideband is a short-range radio technology that’s popular in indoor navigation systems. UWB operates in the frequency range of 3.1 and 10.6 GHz and has a bandwidth of at least 500 MHz.
Indoor positioning systems that are UWB-based differ from Bluetooth® Low Energy beacon solutions in that they utilize Time-of-Flight instead of RSSI measurements to estimate distances that are then used in trilateration calculations to determine device location.
The basic principle behind the time-of-flight method is the ability to calculate the distance from one device to another by knowing both (1) the time it took for the signal to propagate from the transmitter to the receiver and (2) the signal velocity. Finally, these values are utilized in a trilateration calculation to figure out the position of the target device.
Here are a couple of the benefits of UWB indoor positioning systems:
- Higher accuracy than RSSI-based techniques used in other technologies, since they operate in a very broad band of frequencies – measuring the time-of-flight of any radio signal is correlated with its bandwidth
- Reduced interference with other signals due to the low transmit power and short transmit duration of the UWB signal
Some of the disadvantages include:
- High cost, sometimes even prohibitive
- The lack of wide adoption in smartphones and mainstream devices, which has the potential to affect usability and user experience of the system since the solution will require specialized UWB tags (or wristbands) to be worn by the users
- The lack of global standardization – regulations differ across different regions of the world
Wi-Fi
Another wireless technology utilized for indoor navigation systems is Wi-Fi. The main benefit of Wi-Fi is that its infrastructure exists almost everywhere you go. This would seem to make it an easy choice in many cases; however, it lacks some major drawbacks. Some of these are:
- Lower accuracy
- Limited (or non-existent) support on iOS devices compared to Android (in device-centric implementations)
- Requirement of specialized hardware which could lead to high deployment costs (in network-based implementations)
Solutions utilizing Wi-Fi do not necessarily require a connection to the locator nodes/access points, however, non-connection–based solutions have an impact on accuracy and latency times of the system. The two main parameters used in these systems are:
- The RSSI – used for approximate distance calculation
- The MAC address – used for device identification
RSSI measurements are used along with trilateration to determine an approximate location of a device within a space. Fingerprinting is another method that’s used to determine location using Wi-Fi. It utilizes historical RSSI information along with known locations to more accurately determine the location of the device.
Time of Flight (ToF) is another technique sometimes used in WiFi-based indoor navigation implementations. The basic concept takes timestamps provided by the wireless interfaces to calculate the ToF of signals and then use this information to estimate the distance and relative position of one client device with respect to access points. ToF requires a connection between the devices and the local Wi-Fi network which can compromise privacy and security, as well as present scalability issues.
Ultrasonic
Ultrasonic technologies use sound waves to transmit digital data in the frequency range above 20 kHz. In the case of indoor navigation systems, ultrasonic technologies are used for detecting the location of an object using Time-of-Flight (ToF) calculations. ToF, along with trilateration, is utilized to achieve object location detection accuracy within a few centimeters.
Unlike RF signals, ultrasonic signals are usually obstructed by walls and objects within a space. This can serve as an advantage in the case of indoor navigation since it can pinpoint a device’s presence within a specific room.
Ultrasonic indoor navigation systems require the deployment of locator devices within a facility in addition to tags that are attached to the users that need to navigate the space.
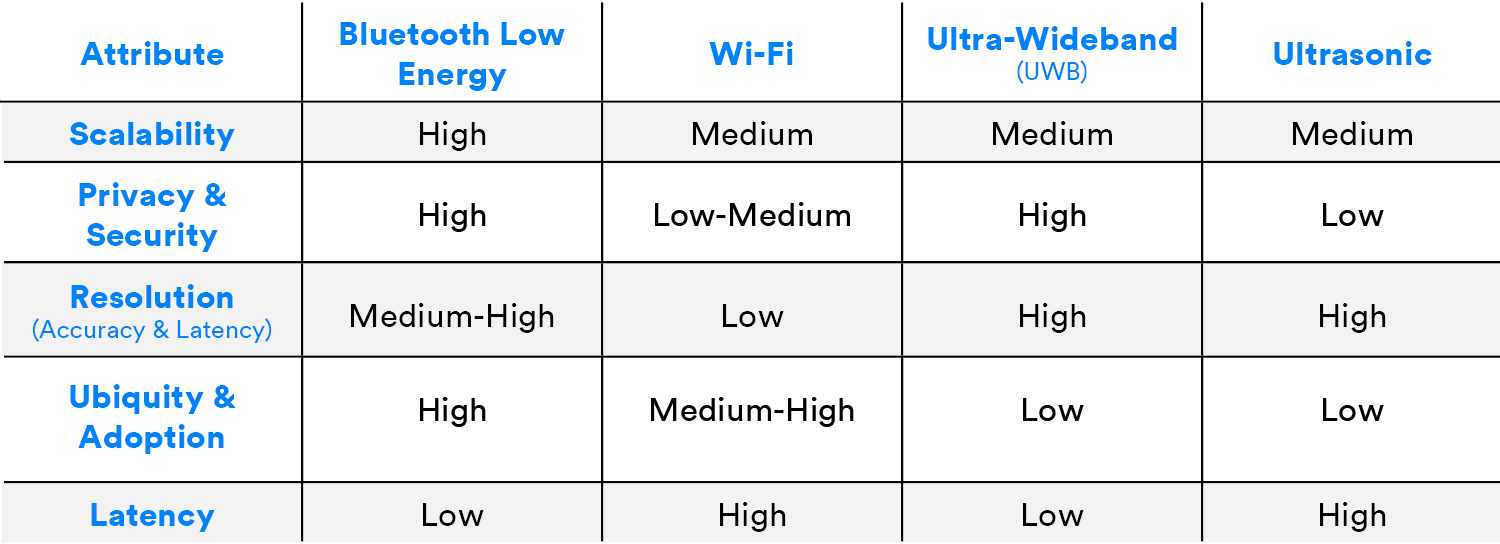
Now, let’s compare the most common technologies in terms of the key attributes we listed:
Further Discussion
It’s important to keep in mind that for some indoor navigation applications it may be more suitable to utilize a combination of one or more of these technologies instead of using a single wireless technology.
In addition to utilizing RSSI, ToF, and other methodologies for determining location, an indoor navigation system could also utilize advanced software algorithms and sensor fusion (utilizing measurements from multiple sensors) to enhance the accuracy of positioning calculations.
![]()
STAY INFORMED
Bluetooth Email Updates
Stay up-to-date on what’s new with Bluetooth, and get the resources you care about, from newly released papers and case studies to developer study guides, videos, and more. Subscribe to receive timely, relevant emails that won’t overfill your inbox.
![Forbes Predictions article 72 dpi 1300 x 680 px 768x402[1]](https://www.bluetooth.com/wp-content/uploads/2024/04/Forbes-Predictions-article-72-dpi-1300-x-680-px-768x4021-1-660x345.png)
Navigating Tomorrow: RTLS Trends and Projections for 2024
Looking back at the rise of location technology throughout 2023, it’s evident that the…
Updated Market Trends for Bluetooth Location Services Solutions
A well-known and popular solution for audio streaming and wearable devices, Bluetooth® technology is now…
High-Accuracy Low-Power Secure Ranging using Bluetooth® Channel Sounding
Many applications use Bluetooth-based ranging and localization using received signal strength indication (RSSI), including…

Bluetooth® Low Energy Angle of Arrival Location Solution – Tags, Receiver, Antenna, Firmware, Application Software
The development of Bluetooth® Low Energy angle of arrival location solutions requires multi-disciplinary co-operation…

Distance Estimation Advantages Using Bluetooth® Channel Sounding
Bluetooth® Channel Sounding is an upcoming feature enables secure, fine ranging between two Bluetooth…

2024 Bluetooth® Market Update
The 2024 Bluetooth® Market Update examines the direction and adoption of Bluetooth technology.

Now Available: New Bluetooth Market Research
The Latest Bluetooth Market Research For the last few years, the Bluetooth Special Interest…
The Role of Bluetooth Technology in the Ambient IoTアンビエントIoTでBluetooth技術が果たす役割
Over the past two years, the Ambient IoT has been a growing topic of…
Why We Need the Ambient IoTアンビエントIoTが必要とされる理由
The next stage of evolution for IoT devices, the Ambient IoT refers to a…

The Ambient IoT - The Emergence of a New Class of Bluetooth® IoT DevicesアンビエントIoT – Bluetooth® IoTデバイスに新たなクラスが登場
Over the past two years, the Ambient IoT has been a growing topic of…

Accessing the IoT Ecosystem
IoT has been an emerging technology for many years. It first appeared on the…

Bluetooth LE and Cellular IoT Wearables Help Us Take Care of Our Pets
Since the 1970s, the role of pets in the family has changed. Back then,…
Using Bluetooth in Location Tracking Devices
Bluetooth ranging technology, which uses the distance between one or more devices through signal…

2023 Bluetooth® Market Update
Featuring new market insights and industry forecasts from ABI Research and other analyst firms...

EJOT | INDUTRAX Case Study
EJOT, headquartered in North-Rhine Westphalia, Germany, is a group of medium-sized companies with production…

The Importance of Standards in the Smart Retail Market
Retailers are increasingly looking towards Internet of Things (IoT) technologies to help them deliver…

The Benefits Of Bluetooth LE Connectivity In Power Tools
Integrating Bluetooth into power tools has emerged as one of the fastest growing –…

Galleria Borghese, Rome Case Study
The Galleria Borghese Museum, based in Rome, houses works by Caravaggio, Raphael, Titian, Correggio,…
No More Queueing At The Hotel Check-in
Over two thirds of the British population now own a smartphone, using it for…
Bluetooth Location Services
See 8 use cases for enhancing building efficiencies and creating a better visitor experience, discover new data that supports the latest trends and forecasts, and find out what’s driving the rapid adoption of location services solutions.
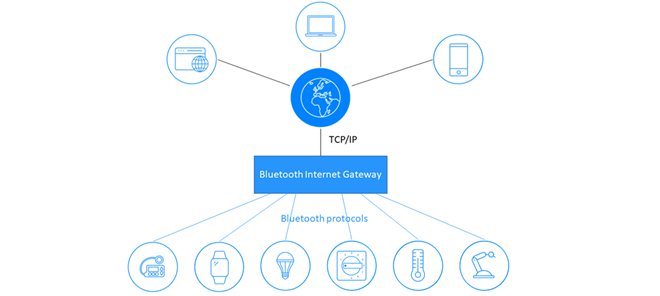
Designing and Developing Bluetooth® Internet Gateways
Learn about Bluetooth® internet gateways, how to make them secure and scalable, and design and implement your own...

Lighting as a Platform
See how connected lighting systems are being used as a platform to enable advanced building services like wayfinding, asset tracking, and space utilization to improve the ROI of smart building investments.
Build a Smarter Building with Blue
See how Bluetooth increases reliability, reduces costs, and enhances your smart building ROI.

An Introduction to Bluetooth Beacons
Learn how to build your own Bluetooth beacon or integrate beacon technology into your existing products and apps.





