Packetcraft, a provider of Bluetooth® stacks and software solutions, and imec, a semiconductor R&D hub with a strong track record in next-gen radio systems, circuits, and algorithms, are collaborating on new Bluetooth Location Services solutions – each bringing their complementary software expertise to market. This includes three top Bluetooth chip companies that have licensed and ported the channel sounding algorithms to their platforms.
Channel sounding is an upcoming feature that, when finalized and adopted, will enable the estimation of the distance between two Bluetooth® LE devices with a higher level of accuracy than when using existing techniques, including direction finding solutions such as angle of arrival (AoA) and signal strength (RSSI) measurements.
Is 10-30-cm Bluetooth ranging accuracy within reach? In this article, we dive into the technical details of Bluetooth channel sounding, based on the draft version of the specifications that has been made public, and we contemplate the applications it will revolutionize and bring about.

The next expansion for Bluetooth Location Services
What do applications such as real-time location services (RTLS), secure building access, digital (car) keys, indoor wayfinding, and proximity detection have in common? They all rely on the ability to pinpoint the location of devices or tags. For this, Bluetooth® technology has long been the technology of choice. It’s low cost, energy efficient, and comes with a mature ecosystem. Basically, every one of us, nearly at all times, has at least one Bluetooth transceiver with us.
That’s not about to change anytime soon. In fact, a recent market study predicts a significant market growth of Bluetooth® Location Services in the coming years. That’s due to factors such as increased interest in secure keyless building and vehicle access, as well as indoor positioning, asset tracking, and proximity-based services. But it’s also driven by technical developments that further improve the accuracy of Bluetooth distance measurement and thereby unlock new use cases.
Channel sounding, previously known as high-accuracy distance measurement (HADM), is the most recent of these innovations, one that entails a quantum leap for Bluetooth distance measurement capabilities. This article introduces you to channel sounding, how it works, how it fits into the Bluetooth system architecture, and some pre-standard performance. But first, let’s take a look at the strengths and limits of earlier techniques.
Established techniques for Bluetooth distance estimation
Received signal strength indication (RSSI)
The oldest method for radio-level distance measurement (ranging) is RSSI. Its basic principle is straightforward: the distance between two radio devices is calculated based on how much the signal between the two – more specifically its amplitude – has decayed over the transmission distance. RSSI can give an indication of the distance between two radio transceivers, though it uses coarse estimates. It’s also well established as it’s available in all smartphones.
However, RSSI’s basic accuracy is relatively low – in the order of multiple meters, typically three to five. A lot depends on the environment, because RSSI is susceptible to interference from external factors, such as absorption and diffraction. Just the fact that you’re holding the device in your hand can make a big difference.
By using multiple beacons and characterizing the RF environment, RSSI’s accuracy can be enhanced, and it becomes possible to estimate the position of a device in a space. Still, some applications, such as smart locks, may require a higher level of accuracy and security.
Angle of arrival (AoA) and angle of departure (AoD)
First introduced in Bluetooth® Core 5.1, Bluetooth Direction Finding approach to AoA and AoD presents the first meaningful advance in distance ranging accuracy compared with RSSI. Both techniques don’t directly measure distance but rather estimate the angle of incoming and outgoing radio signals respectively. Using trigonometry, distances can then be calculated.
These solutions do, however, require multiple antennas to work their magic:
- Angle of arrival (AoA) relies on an antenna array in the receiver that captures the phase shift when the signal consecutively hits the antennas to calculate the angle of the incoming signal.
- Angle of departure (AoD) allows the receiver to attribute measurements from its single antenna to particular antennas within the transmitter. It then calculates the angle of the outgoing signal. For this to work, the receiver needs to know the design of the antenna array at the transmitter’s side. AoD is more complex than AoA and is therefore used much less frequently in direction finding implementations.
Angle of arrival and angle of departure are capable of achieving sub-meter accuracy, but a lot depends on the practical circumstances. For indoor locations with a lot of obstacles and reflecting surfaces, multipath propagation (the fact that the signal reaches the receiver through indirect routes as well as potentially via a direct one) can hinder reliable measurements.
This leads us to Bluetooth® channel sounding, the latest breakthrough in high-accuracy distance measurement.
How Bluetooth® Channel Sounding works
Unlike AoA and AoD, which require multiple antennas, increasing the chip’s footprint, and can suffer from performance challenges in multipath environments, Bluetooth® channel sounding will introduce a new method to achieve accurate distance estimates known as phase-based ranging (PBR).
In phase-based ranging, a precise estimate of the distance between the two radio devices is accomplished by analyzing the radio signal’s phase. Essentially, the time of flight of the radio signal, i.e., the distance between the two devices, is measured in a precise way using phase data.
To measure phase data, both devices alternatingly transmit and receive in a coordinated way. This is repeated multiple times over different frequencies (channels), resolving ambiguities and improving the precision, even in the presence of reflections (multipath), as, for example, in indoor environments.
How channel sounding fits Into the Bluetooth system architecture
In the Bluetooth® system, channel sounding introduces hardware changes by means of a new physical layer that uses amplitude-shift keying modulation on 72 physical channels. Channel sounding radio operations are time multiplexed in a coordinated fashion with other Bluetooth LE radio operations in the 2.4-GHz band, such as advertising, scanning, and data communication.
A closer look at the Bluetooth LE stack reveals that most of the channel sounding feature is included in the link layer, which is a MAC layer protocol above the RF/PHY layer. The link layer handles procedures for advertising, scanning, connection management, asynchronous and isochronous data communication, and data encryption. For Bluetooth channel sounding, the link layer is responsible for:
- Negotiating and setting up a channel sounding procedure between two devices
- Scheduling the channel sounding radio operations
- Configuring the RF/PHY layer to perform the required tone exchanges during each radio operation
- Managing channel sounding security procedures

A channel sounding procedure consists of a series of radio operations known as channel sounding events. During a channel sounding event, two devices exchange information that’s used to perform distance estimation. This exchange consists of both tones used for distance estimation and packets containing data related to the channel sounding procedure.
A channel sounding event consists of subevents, with each subevent entailing multiple channel sounding steps. A channel sounding step is a series of tightly synchronized tone transmissions between devices.
Dividing a channel sounding procedure into events and subevents allows for maximum flexibility in scheduling channel sounding radio activity, and, therefore, optimum coexistence with other timing-sensitive Bluetooth communications.

The high-level communication sequence between two devices performing a channel sounding procedure starts with the establishment of a Bluetooth LE connection. The devices then exchange channel sounding capabilities and negotiate the configuration. After channel sounding security is enabled, the channel sounding procedure can start.
Following each channel sounding subevent, the devices exchange measurement results. This is repeated until the channel sounding procedure has gone through all requested physical channels, up to 72 across the entire frequency band. The channel sounding procedure is then terminated.

Finally, measurement results from the link layer are sent up to an application in the device that typically uses a distance estimation algorithm to calculate the distance between the two devices.
Channel sounding doesn’t specify which algorithm should be used to calculate distance estimates from the measurement data. This allows companies to tailor their offering to different use cases, adjusting computational complexity to the required estimation accuracy and the expected radio environments for the given use case. Examples range from simple phase difference calculation and fast Fourier transformation (FFT) based methods to advanced super-resolution algorithms for coping with severe multipath scenarios (indoor environments).

Will channel sounding make other distance ranging solutions obsolete?
Its unprecedented accuracy and security make Bluetooth® channel sounding the obvious choice for a wide range of applications such as secure access, indoor wayfinding, and asset tracking.
Currently, only ultra-wideband (UWB) impulse radio in combination with ToF measurements can deliver higher precision accuracy in the order of cm to sub-cm. Bluetooth technology maintains a strong and broad industry ecosystem with annual device shipments exceeding 5B – meaning many devices and sensors can quickly leverage the new capabilities offered through Bluetooth channel sounding – UWB is a new chipset that needs to be added to a device, increasing the cost and the need to manage interference from another radio. Moreover, although UWB’s power consumption is reducing as a result of concerted research efforts, it’s still higher than that of Bluetooth technology. For all these reasons, using UWB can only be justified when the application requirements exceed the capabilities afforded by Bluetooth channel sounding.
On the other hand, it might not be helpful to look for a definitive positioning technology that shadows its competitors. Rather, we seem to be evolving to hybrid setups where different solutions all get their place under the sun.
In a single chip or product, multiple ranging methods can be incorporated, each primed to act when it’s the right technology for the job at hand. For example, RSSI can start off with a coarse distance estimation, after which a more precise method can kick in. Or there might be a solution that takes joint angle and distance estimation (JADE) and combines angle of arrival with channel sounding to deliver both ranging and angle information.
In conclusion, the upcoming ratification of Bluetooth® channel sounding marks the beginning of a new era for radio-based positioning. We can make informed guesses about the applications that will be enabled or improved as we’re moving closer to 10-cm accuracy in real-world settings. Our greatest excitement – and our pride in playing our respective roles in its achievement – comes from the knowledge that innovators will no doubt run with this new capability in ways that we cannot yet imagine, bringing new products and services that we will one day take for granted.
Bluetooth®︎スタックおよびソフトウェアソリューションプロバイダーのPacketcraftと、次世代無線システム、回路、アルゴリズムで豊富な実績を有する半導体R&DハブのIMECは、市場においてお互いを補完するソフトウェアの専門知識を持ち寄り、新たなBluetooth位置情報サービスソリューションで提携しています。この提携には、チャネルサウンディングアルゴリズムのライセンスを取得し、自社プラットフォームに移植したBluetoothチップのトップ企業3社も含まれます。
チャネルサウンディングは次世代技術のひとつであり、最終化および採用された際には、2台のBluetooth Low Energy(LE)デバイス間の距離を高精度で推定できるようになります。その精度は非常に高く、到達角度(AoA)や信号強度(RSSI)測定などの既存の方向探知ソリューション等の技術よりも優れた精度を実現します。
Bluetooth測距は、10~30cmの精度にまで到達するのでしょうか?この記事では、Bluetoothチャネルサウンディングの技術面を、公開された仕様の草案に基づいて掘り下げます。また、この技術によって革新され、新たにもたらされる用途について考察します。
Bluetooth位置情報サービスの新たなる進化
リアルタイム位置情報サービス(RTLS)、セキュアな建物へのアクセス、デジタル(自動車)キー、屋内経路検索、近接検出といったソリューションの共通点は何でしょうか?それはデバイスやタグをピンポイントで位置特定する機能に依拠する点です。この用途において、Bluetooth®技術は長年にわたり選ばれてきました。低コストでエネルギー効率が高く、成熟したエコシステムが構築されているBluetooth は、まさにうってつけの技術なのです。基本的に私たちの全員が、ほぼ常に、少なくとも1台のBluetooth受信機を携帯しています。
この状態は、今後しばらく変わりません。実際、最新の市場調査によると、今後数年でBluetooth®︎位置情報サービスの市場規模が大幅に拡大すると予測されています。この背景には、建物や車両へのセキュアなキーレスアクセス、屋内位置情報、資産追跡、近接ベースのサービスなどへの関心の高まりがあります。一方で、Bluetoothの測距精度をさらに向上させる技術の進歩によって、新たなユースケースへの扉が開かれていることも、市場拡大の推進力となっています。
Bluetooth測距機能に飛躍的な進歩をもたらすとされているのが、最新の技術革新であるチャネルサウンディング(以前の呼び名は高精度距離測定、HADM)です。この記事では、チャネルサウンディングについて、その仕組みに加えて、Bluetoothシステムアーキテクチャへの適合方法、先行標準の性能について解説します。しかしその前に、従来の各種技術それぞれの長所と限界について見てみましょう。
既存のBluetooth距離推定技術
受信信号強度表示(RSSI)
無線による最も古い距離測定(測距)技術はRSSIです。その基本原理は単純で、2台の無線デバイス間の信号(の振幅)が伝送距離によって減衰した量に基づき、デバイス間の距離を計算します。RSSIは、2台の無線受信機の間の距離を表すことができますが、その結果は大まかな推定値となります。また、すべてのスマートフォンで利用できる、十分に確立された技術です。
しかし、RSSIの基本精度は数メートル単位と比較的低くなっており、一般的には3〜5メートル程度です。RSSIは吸収や回折などの外的要因の干渉を受けやすいため、環境にも大きく依存します。単に、デバイスを手で持っているかどうか、という要素によっても、結果に大きな違いが生じます。
複数のビーコンを使用してRF環境を特性化することで、RSSIの精度を高め、空間内のデバイスの位置を推定できるようになります。それでも、スマートロックなどの一部の用途では、より高いレベルの精度とセキュリティが必要になる可能性があります。
到達角度(AoA)と発信角度(AoD)
Bluetooth®︎コア仕様バージョン5.1で初めて導入されたAoAおよびAoDによるBluetooth方向検出は、RSSIから大幅な測距精度の向上を達成した初めての技術です。いずれの手法も、距離を直接測定するのではなく、無線信号の到達・発信の角度をそれぞれ推定し、三角法を使用して距離を算出します。
ただしこれらのソリューションでは、複数のアンテナが必要になります。
- AoAは、受信側のアンテナ群に依存します。信号がアンテナに連続で到達した際における位相のシフトを捉えることで、受信信号の角度を計算します。
- AoDを使用すると、受信機の1台のアンテナから、送信機の特定のアンテナまでの測定を判別できるようになります。これを利用して、発信信号の角度を計算します。これを機能させるには、受信機側が送信機側のアンテナ群の設計を把握している必要があります。AoDはAoAよりも複雑なため、方向検知ではあまり使われません。
AoAとAoDは1メートル未満の精度で測定できますが、現場の環境の影響が大きい技術でもあります。障害物や反射面が多い屋内では、マルチパス伝播(信号が直接的な経路だけでなく、間接的な経路を経由して受信機に到達すること)となり、測定の信頼性を損なう可能性があります。
これを経て生まれたのが、高精度距離測定における最新のブレークスルーであるBluetooth®︎チャネルサウンディングです。
Bluetoothチャネルサウンディングの仕組み
AoAとAoDは複数のアンテナを必要とし、チップ面積の増加やマルチパス環境でのパフォーマンスといった課題が存在します。一方、Bluetooth®︎チャネルサウンディングでは「位相ベース測距(PBR)」と呼ばれる、正確な距離推定の方法を新たに導入します。
PBRでは、無線信号の位相を分析することで、2台の無線デバイス間の距離を正確に推定します。無線信号の移動時間、すなわち2台のデバイス間の距離は、基本的に位相データを使用して、正確に測定されます。
位相データを測定するため、2台のデバイスは交互に協調して送受信を行います。この送受信は、異なる周波数(チャネル)で複数回にわたって繰り返されるため、屋内などで反射(マルチパス)が存在する環境でも、曖昧性を解決し測定の精度を向上させます。

Bluetoothシステムアーキテクチャへのチャネルサウンディングの導入
Bluetooth®︎システムにおけるチャネルサウンディングでは、72の物理チャネルで、振幅偏移変調を用いて、新たな物理層でハードウェアの変更を実装します。チャネルサウンディングの無線動作は、アドバタイジング、スキャン、データ通信など、2.4GHz帯域の他のBluetooth LE無線動作と協調して、時分割多重化されます。
Bluetooth LEスタックを詳しく見ると、チャネルサウンディング機能の大部分が、RF/PHY層の上にあるMAC層プロトコルであるリンク層に含まれていることがわかります。リンク層は、アドバタイジング、スキャン、接続管理、非同期・アイソクロノスデータ通信、およびデータ暗号化のプロシージャを処理します。Bluetoothチャネルサウンディングでは、リンク層は以下のプロシージャを行います。
- 2台のデバイス間でのチャネルサウンディングプロシージャのネゴシエーションと設定
- チャネルサウンディングの無線動作のスケジューリング
- 各無線動作中に必要なトーン交換のためのRF/PHYレイヤー設定
- チャネルサウンディングのセキュリティプロシージャの管理
チャネルサウンディングのプロシージャは、チャネルサウンディングイベントと呼ばれる一連の無線動作で構成されます。チャネルサウンディングイベントの間に、2台のデバイスが、距離推定の実行に用いられる情報を交換します。この情報の交換は、距離の推定に使用されるトーンと、チャネルサウンディングプロシージャの関連データを含むパケットで構成されます。
チャネルサウンディングイベントはサブイベントで構成され、各サブイベントには、チャネルサウンディングに関する複数のステップが含まれます。チャネルサウンディングの各ステップでは、デバイス間で厳密に同期された一連のトーン送信が行われます。

チャネルサウンディングのプロシージャをイベントとサブイベントに分割することで、チャネルサウンディングの無線アクティビティのスケジュールを柔軟に設定できるため、タイミングが重要になる他のBluetooth通信とも最適な形で共存できます。
チャネルサウンディングプロシージャを実行する2台のデバイス間における高レベルの通信シーケンスは、Bluetooth LE接続の確立から始まります。その後、デバイスはチャネルサウンディング機能を交換し、設定をネゴシエートします。チャネルサウンディングのセキュリティの有効化後に、チャネルサウンディングのプロシージャを開始できます。
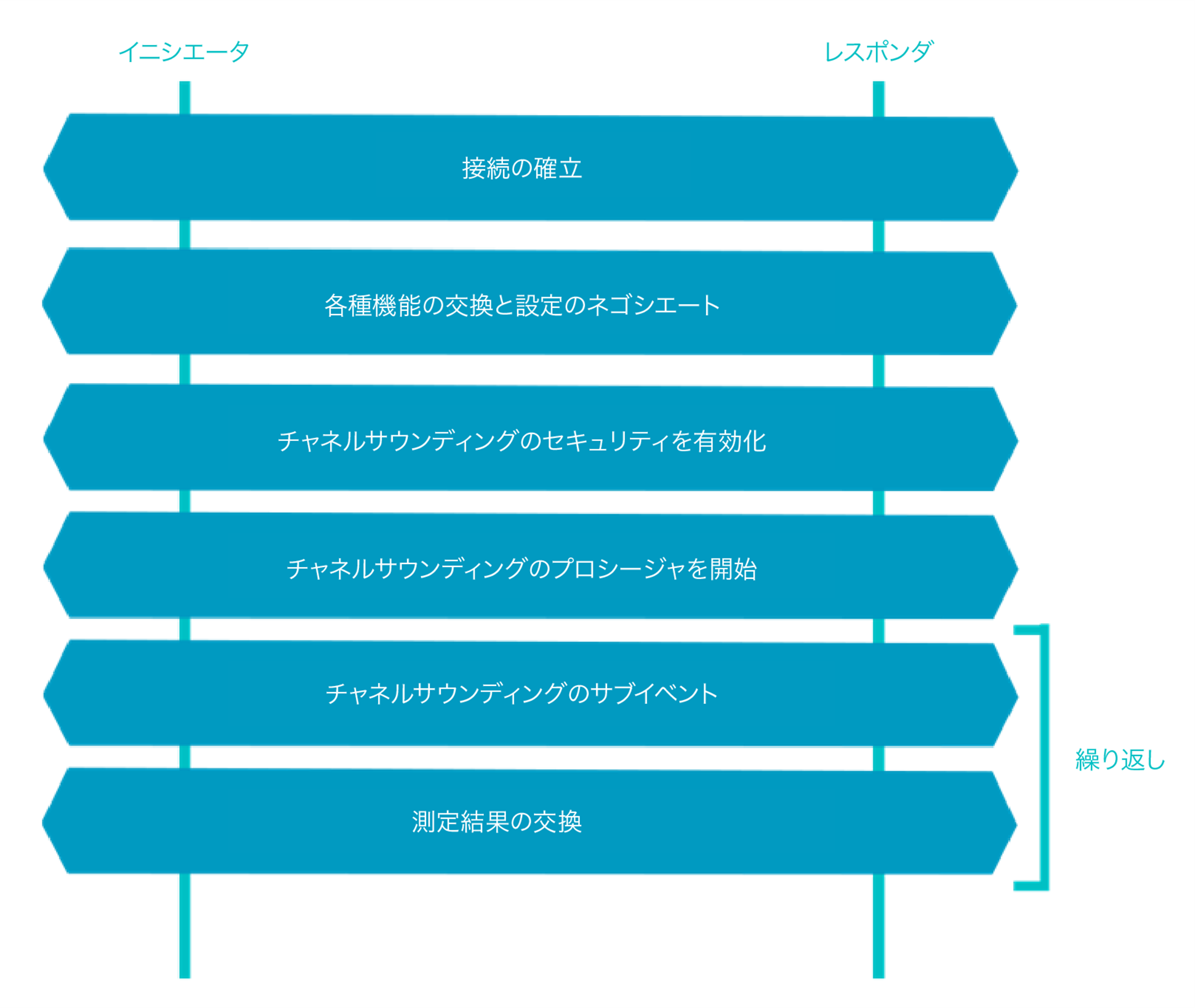
デバイスは、チャネルサウンディングの各サブイベントに続き、測定結果を交換します。この処理は、チャネルサウンディングのプロシージャが要求されたすべての物理チャネルについて完了するまで繰り返され、チャネル数は周波数帯域全体で最大72となります。その後、チャネルのサウンディングプロシージャは終了します。
最後に、リンク層からの測定結果がデバイス内のアプリケーションに送信されます。このアプリケーションは通常、距離推定アルゴリズムを使用して、2台のデバイス間の距離を計算します。
チャネルサウンディングでは、測定データから距離推定を計算するためのアルゴリズムは指定されません。そのため各企業は、各種ユースケースにぴったりと沿った開発が可能となります。目的とするユースケースに必要な推定精度と無線環境に合わせ、どのくらい複雑な計算を実施するかを調整できるのです。その選択肢の範囲は、例えば単純な位相差計算や高速フーリエ変換(FFT)ベースのアプローチから、屋内環境の厳しいマルチパスシナリオに対処するための高度な超解像アルゴリズムまで、さまざまな手法に及びます。
チャネルサウンディングの登場は、その他の距離測定ソリューションを時代遅れなものとするか?
かつてない精度とセキュリティをもたらすBluetooth®︎のチャネルサウンディングは、セキュアアクセス、屋内の経路検索、資産追跡など、さまざまなアプリケーションにおいて最適な選択肢です。
現在、センチメートル単位またはそれ以上の高精度を実現できるのは、超広帯域(UWB)インパルス無線とToF測定を組み合わせた場合のみです。一方、Bluetooth技術を搭載したデバイスの年間出荷台数は50億台を超えており、強力かつ広範な業界エコシステムを維持しています。そのため、多数のデバイスやセンサーが、Bluetoothチャネルサウンディング機能のもたらす新機能を迅速に活用できます。UWBでは、デバイスに新しいチップセットを追加する必要があり、コストが増加するだけでなく、別の無線機からの干渉を管理する必要性が生じます。さらに、UWBの消費電力は、共同研究の成果によって低減されてはいるものの、いまだBluetooth技術の消費電力よりも高くなっています。 以上の理由から、UWBの選択が合理的なケースは、アプリケーション要件がBluetoothチャネルサウンディングの機能を超えている場合のみと言えるでしょう。
一方、競合他社を決定的に上回る位置情報技術を目指すことが、さほど意義を持たない可能性もあります。 むしろ、各種のあらゆるソリューションが日の目を見るような、ハイブリッド型のセットアップに向けた進化が続いています。
単一のチップや製品に、複数の測距方式が組み込まれ、それぞれが目的に適した技術である場合に優先して動作するように準備されています。例えば、RSSIを使った大まかな距離推定から開始し、その後、より正確な手法による推定が行われるような形です。または、ジョイント角度・距離推定(JADE)を採用し、AoAとチャネルサウンディングを組み合わせることで、測距と角度の両方の情報を提供するソリューションを利用できるといった場合もあります。
結論として、来るべきBluetooth®︎チャネルサウンディングの採用は、無線ベースの位置情報ソリューションに新たな時代の幕を開きます。 現実世界の設定で精度10 cmに近づくにつれ、有効化または改善が予期されるアプリケーションについて、情報に裏付けられた形で推測できるようになります。 革新性に溢れた業界の企業各社は、この新機能を私たちの想像すら及ばないような方法で活用し、いつの日か、誰もが当たり前に享受するような新製品やサービスをもたらすでしょう。その達成のための重要な役割を担うことこそが、私たちにとっての誇りであり、最大の喜びなのです。